
Jiaxi Jiang 蒋佳熹
PhD Student in Computer Science
ETH Zurich, Switzerland
CV | Google Scholar | Github | LinkedIn | X (Twitter) | Email
Follow
@cs_jiaxi_jiang
About Me
I am a final-year PhD candidate in Computer Science at the Sensing, Interaction & Perception Lab, ETH Zurich with Prof. Christian Holz. I've also recently completed my internship at Meta Reality Labs Research with Dr. Federica Bogo.
During my research journey, I was fortunate to collaborate with Larissa Laich and Dr. Patrick Snape from Meta Reality Labs, Zurich. Before starting my PhD, I got my Master’s degree in Computational Engineering Science (Specialized in Computer Vision and Robotics) from RWTH Aachen University, Germany. I wrote my Master’s thesis at the Computer Vision Lab, ETH Zurich, with Prof. Kai Zhang and Prof. Radu Timofte, supervised by Prof. Luc Van Gool and Prof. Bastian Leibe. Before that, I did a visiting research with Dr. Shuang Li and Prof. Jianwei Zhang at the University of Hamburg. Besides, I also worked with Dr. Jörg Stückler at Max Planck Institute for Intelligent Systems, and with Dr. Dengxin Dai at Max Planck Institute for Informatics.
I am currently on the job market for faculty, postdoc, or research scientist positions. Please feel free to reach out!
Research
My research focuses on scalable full-body human behavior learning through egocentric perception, to advance human motion modeling, embodied intelligence, and computational interaction. Specifically, I am interested in:
- Egocentric Vision: Modeling and representation learning of human–scene interactions from egocentric vision to bridge perception, motion understanding, and embodied decision-making.
- Human Motion and Interaction: Scalable 3D motion tracking and generation from multimodal data (e.g., video, text, wearables), and sensing-driven input and interaction techniques for AR/VR, robotics, animation, and health.
- Embodied AI: Learning robotic skills and interaction policies from human demonstrations and teleoperation, using learned world representations for perception, prediction, and control.
News
- 06/2026 Our paper EgoExoMoCap is accepted by ECCV 2026. See you in Malmö, Sweden!
- 06/2025 I join Meta Zurich as a Research Scientist Intern with Dr. Federica Bogo.
- 06/2025 Our paper Group Inertial Poser is accepted by ICCV 2025. See you in Hawaii!
- 05/2025 Our paper Garment Inertial Poser is accepted by IJCAI 2025.
- 09/2024 Our paper EgoSim is accepted by NeurIPS 2024.
- 07/2024 Two papers EgoPoser and MANIKIN are accepted by ECCV 2024. See you in Milan! Stay tuned for code releases.
- 04/2024 Our paper Ultra Inertial Poser is accepted by SIGGRAPH 2024.
- 08/2023 Our paper TapLight is accepted by UIST 2023.
- 09/2022 I am awarded the Springorium Commemorative Coin during the graduation ceremony by RWTH Aachen.
- 07/2022 Our paper AvatarPoser is accpeted by ECCV 2022.
- 02/2022 Our paper TapType is accepted by CHI 2022.
- 07/2021 I join Sensing, Interaction & Perception Lab, ETH Zurich as a research assistant.
- 07/2021 My master's thesis FBCNN is accepted by ICCV 2021! Great appreciation to Dr. Kai Zhang and Prof. Radu Timofte!
- 04/2021 I get my master's degree with distinction from RWTH Aachen University.
- 09/2020 I start my master's thesis at the Computer Vision Lab, ETH Zurich as an IDEA League research student.
- 06/2020 Our paper on Teleoperation is accepted by IROS 2020.
Publications (* supervised projects)
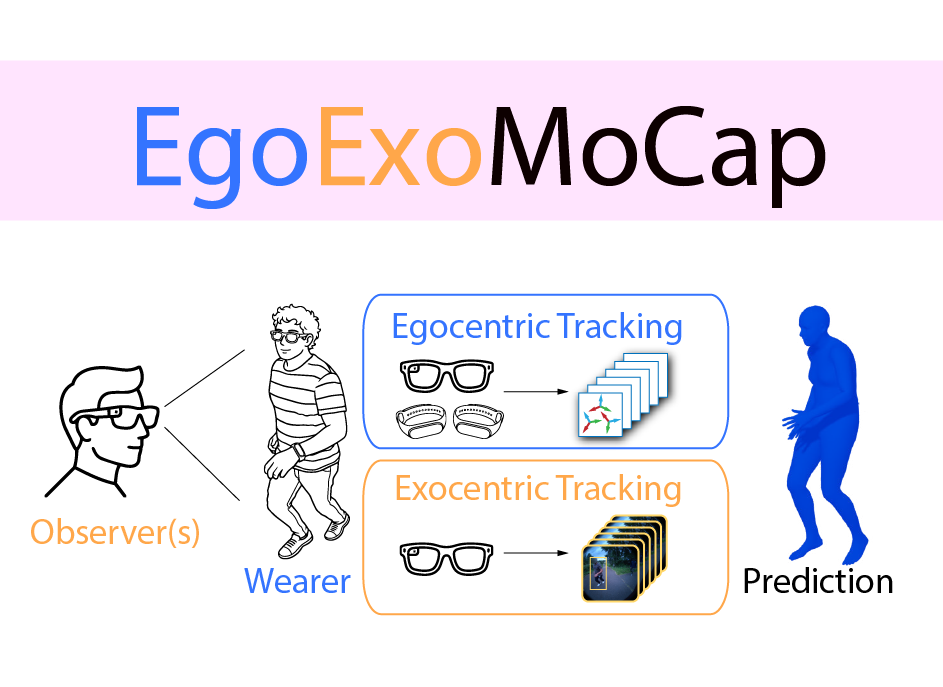
EgoExoMoCap: Distributed Ego-Exo Human Motion Capture European Conference on Computer Vision (ECCV Oral), 2026. Project Page Paper BibTeX Code Full-body motion capture in the wild from consumer smart glasses and optional wristbands — the first to jointly fuse egocentric and exocentric signals in a distributed framework.
@article{jiang2026egoexomocap,
title={EgoExoMoCap: Distributed Ego-Exo Human Motion Capture},
author={Jiang, Jiaxi and Bhatnagar, Bharat Lal and Yang, Nan and Ma, Lingni and Starke, Sebastian and Kips, Robin and Bertsch, Nadine and Holz, Christian and Bogo, Federica},
journal={arXiv preprint arXiv:2607.15868},
year={2026}
}
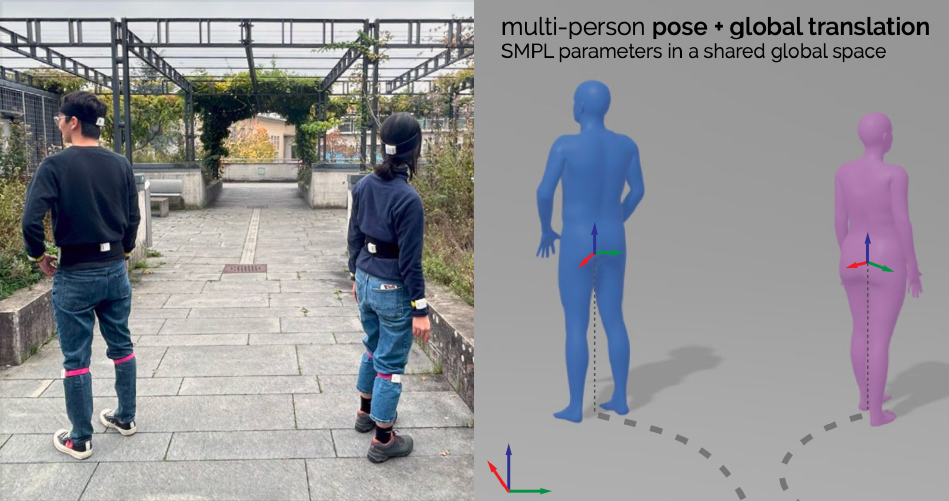
Group Inertial Poser: Multi-Person Pose and Global Translation from Sparse Inertial Sensors and Ultra-Wideband Ranging International Conference on Computer Vision (ICCV), 2025. Project Page Paper Poster BibTeX Code Multi-person mocap from sparse IMUs was thought infeasible. Ultra-wideband ranging between wearers makes it work — anywhere, with no cameras.
@inproceedings{jiang2024egoposer,
title={EgoPoser: Robust real-time egocentric pose estimation from sparse and intermittent observations everywhere},
author={Jiang, Jiaxi and Streli, Paul and Meier, Manuel and Holz, Christian},
booktitle={European Conference on Computer Vision},
year={2024},
organization={Springer}
}
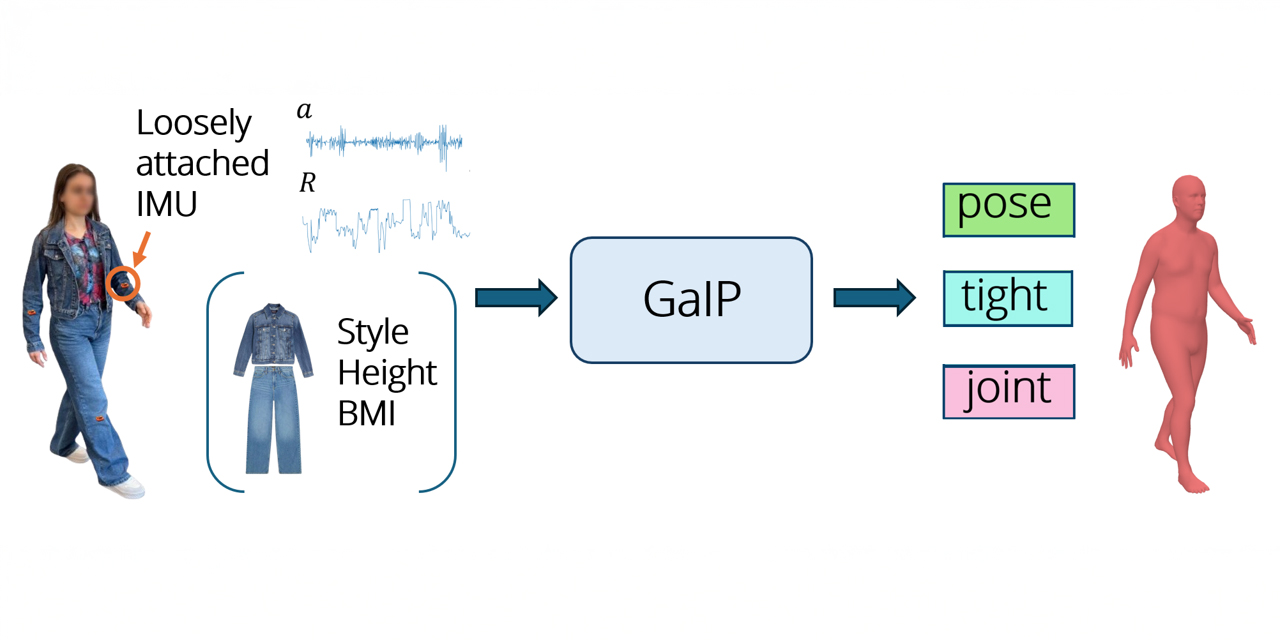
Garment Inertial Poser: Human Motion Capture from Loose and Sparse Inertial Sensors with Garment-aware Diffusion Models International Joint Conferences on Artificial Intelligence (IJCAI), 2025. Project Page Paper BibTeX Mocap escapes the lab and moves into real clothing: a diffusion model that knows how IMUs slide and swing with loose fabric.
@article{ilic2025human,
title={Human Motion Capture from Loose and Sparse Inertial Sensors with Garment-aware Diffusion Models},
author={Ilic, Andela and Jiang, Jiaxi and Streli, Paul and Liu, Xintong and Holz, Christian},
journal={arXiv preprint arXiv:2506.15290},
year={2025}
}
MANIKIN: Biomechanically Accurate Neural Inverse Kinematics for Human Motion Estimation European Conference on Computer Vision (ECCV), 2024. Project Page Paper Poster BibTeX Biomechanics baked straight into a neural IK solver — anatomically plausible full-body pose from sparse sensors, with none of the bent-elbow contortions.
@inproceedings{jiang2024manikin,
title={Manikin: Biomechanically accurate neural inverse kinematics for human motion estimation},
author={Jiang, Jiaxi and Streli, Paul and Luo, Xuejing and Gebhardt, Christoph and Holz, Christian},
booktitle={European Conference on Computer Vision},
year={2024},
organization={Springer}
}
EgoPoser: Robust Real-Time Egocentric Pose Estimation from Sparse and Intermittent Observations Everywhere European Conference on Computer Vision (ECCV), 2024. Project Page Paper Poster BibTeX Code Real-time full-body pose from a head-mounted device — holding up when the hands leave its field of view, and working anywhere you walk.
@inproceedings{jiang2024egoposer,
title={EgoPoser: Robust real-time egocentric pose estimation from sparse and intermittent observations everywhere},
author={Jiang, Jiaxi and Streli, Paul and Meier, Manuel and Holz, Christian},
booktitle={European Conference on Computer Vision},
year={2024},
organization={Springer}
}
EgoSim: An Egocentric Multi-view Simulator and Real Dataset for Body-worn Cameras during Motion and Activity Neural Information Processing Systems (NeurIPS), 2024 Project Page Paper Video BibTeX Dataset Code A simulator and paired real-world dataset that finally expose egocentric vision to the blur, occlusion, and swing body-worn cameras actually endure.
@inproceedings{hollidtegosim,
title={EgoSim: An Egocentric Multi-view Simulator and Real Dataset for Body-worn Cameras during Motion and Activity},
author={Hollidt, Dominik and Streli, Paul and Jiang, Jiaxi and Haghighi, Yasaman and Qian, Changlin and Liu, Xintong and Holz, Christian},
booktitle={The Thirty-eight Conference on Neural Information Processing Systems Datasets and Benchmarks Track}
}
Ultra Inertial Poser: Scalable Motion Capture and Tracking from Sparse Inertial Sensors and Ultra-Wideband Ranging ACM SIGGRAPH 2024 Project Page Paper Video BibTeX Code Global drift has haunted sparse-IMU mocap for years. Ultra-wideband ranging between sensors anchors absolute position and limb geometry — camera-free, marker-free.
@article{armani2024ultra,
title={Ultra Inertial Poser: Scalable Motion Capture and Tracking from Sparse Inertial Sensors and Ultra-Wideband Ranging},
author={Armani, Rayan and Qian, Changlin and Jiang, Jiaxi and Holz, Christian},
journal={arXiv preprint arXiv:2404.19541},
year={2024}
}
Structured Light Speckle: Joint Ego-Centric Depth Estimation and Low-Latency Contact Detection via Remote Vibrometry ACM Symposium on User Interface Software and Technology (UIST), 2023. Project Page Paper Video Talk BibTeX A single camera reads dense depth and low-latency touch off any surface — by decoding the faint tremor of laser speckle.
@inproceedings{uist2023-structured_light_speckle,
author = {Streli, Paul and Jiang, Jiaxi and Rossie, Juliete and Holz, Christian},
title = {Structured Light Speckle: Joint Ego-Centric Depth Estimation and Low-Latency Contact Detection via Remote Vibrometry},
year = {2023},
isbn = {9798400701320},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
doi = {https://doi.org/10.1145/3586183.3606749},
booktitle = {Proceedings of the 36th Annual ACM Symposium on User Interface Software and Technology},
articleno = {26},
numpages = {12}
}
AvatarPoser: Articulated Full-Body Pose Tracking from Sparse Motion Sensing European Conference on Computer Vision (ECCV), 2022. Project Page Paper Poster Video BibTeX Code The first to bring legs to VR avatars — full-body motion inferred from headset and hand tracking that contains zero leg observations.
@inproceedings{jiang2022avatarposer,
title={Avatarposer: Articulated full-body pose tracking from sparse motion sensing},
author={Jiang, Jiaxi and Streli, Paul and Qiu, Huajian and Fender, Andreas and Laich, Larissa and Snape, Patrick and Holz, Christian},
booktitle={European Conference on Computer Vision},
pages={443--460},
year={2022},
organization={Springer}
}

TapType: Ten-Finger Text Entry on Everyday Surfaces via Bayesian Inference ACM CHI Conference on Human Factors in Computing Systems (CHI), 2022. Project Page Paper Video Demo BibTeX Ten-finger typing on any flat surface — a table, a desk, a wall — wearing nothing but two wristbands.
@inproceedings{chi2022-taptype,
author = {Streli, Paul and Jiang, Jiaxi and Fender, Andreas and Meier, Manuel and Romat, Hugo and Holz, Christian},
title = {TapType: Ten-finger text entry on everyday surfaces via Bayesian inference},
year = {2022},
isbn = {9781450391573},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
doi = {https://doi.org/10.1145/3491102.3501878},
booktitle = {Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems},
numpages = {16}
}
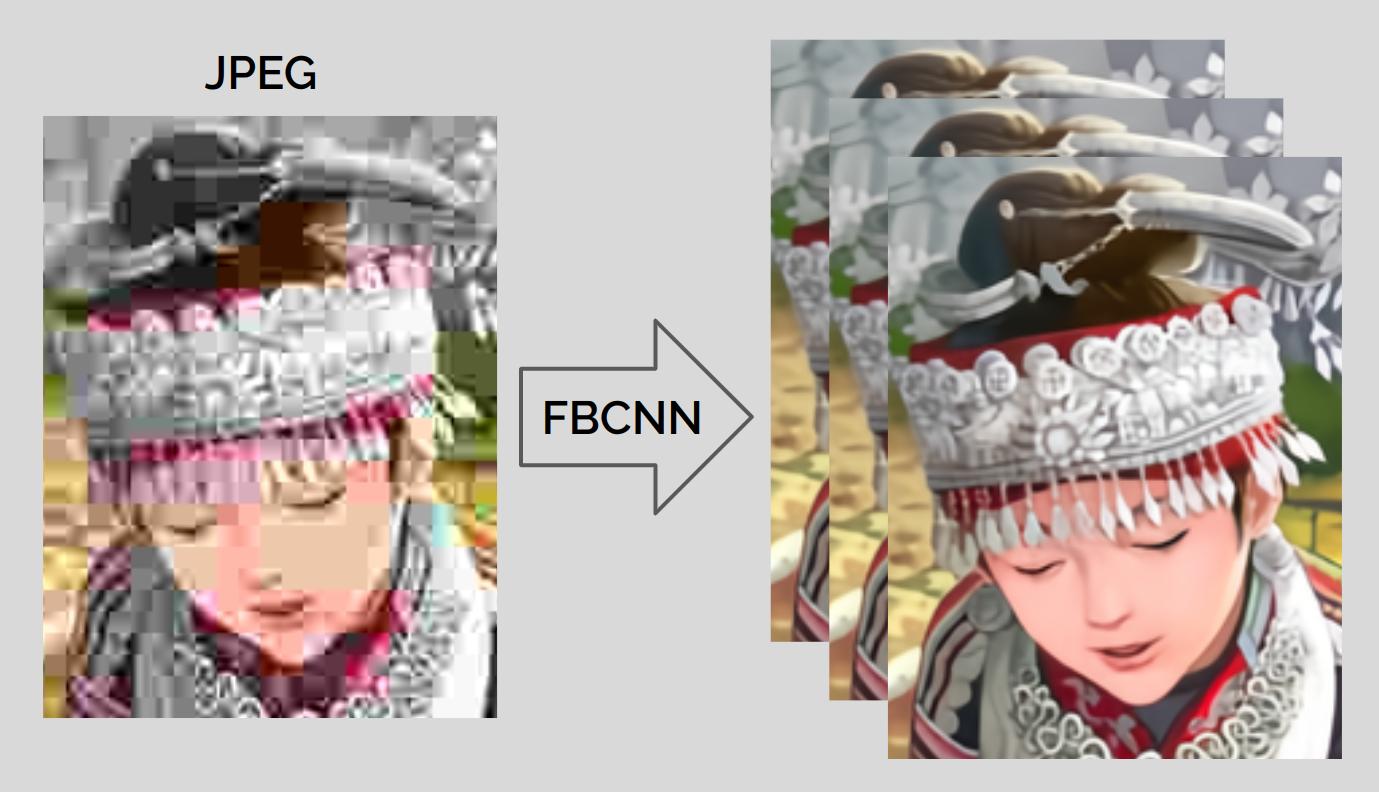
Towards Flexible Blind JPEG Artifacts Removal International Conference on Computer Vision (ICCV), 2021. Paper Poster BibTeX Code Master Thesis Blind JPEG artifact removal with a dial: trade detail against smoothness at inference time, with no retraining and no per-quality model.
@inproceedings{jiang2021towards,
title={Towards Flexible Blind JPEG Artifacts Removal},
author={Jiang, Jiaxi and Zhang, Kai and Timofte, Radu},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision},
pages={4997--5006},
year={2021}
}
A Mobile Robot Hand-Arm Teleoperation System by Vision and IMU International Conference on Intelligent Robots and Systems (IROS), 2020. Project Page Paper Video BibTeX Code Drive a dexterous mobile manipulator in real time with only a low-cost depth camera (hand pose) and a wearable IMU device (arm pose) — no optical mocap rig.
@inproceedings{li2020mobile,
title={A mobile robot hand-arm teleoperation system by vision and imu},
author={Li, Shuang and Jiang, Jiaxi and Ruppel, Philipp and Liang, Hongzhuo and Ma, Xiaojian and Hendrich, Norman and Sun, Fuchun and Zhang, Jianwei},
booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={10900--10906},
year={2020},
organization={IEEE}
}
Academic Services
Reviewers
Computer Vision: CVPR, ICCV, ECCV, TIP
Computer Graphics: SIGGRAPH, SIGGRAPH Asia, ToG
Machine Learning: NeurIPS, ICLR, ICML, AAAI
Human-Computer Interaction: CHI, UIST, IEEE VR
Teaching
Egocentric Computer Vision: Perception and Understanding from the First-Person View, ETH Zurich, Spring 2026
Artificial Intelligence for Digital Characters, ETH Zurich, Spring 2025, Spring 2026
Egocentric Perception for Human-World Understanding, ETH Zurich, Spring 2025
Computer Science I, ETH Zurich, Autumn 2024
Stochastics and Machine Learning, ETH Zurich, Spring 2024
Mixed Reality, ETH Zurich, Autumn 2023
Big Data For Engineers, ETH Zurich, Spring 2023
Supervised Students
Qi Ma, Master Thesis, MSc in CS, ETH Zurich, 11.2025 - Present
Liuxin Qing, Semester & Master Thesis, MSc in EE, ETH Zurich, 10.2024 - 02.2026, now Software Engineer at Neura Robotics
Nicola Witzig, Bachelor Thesis, BSc in CS, ETH Zurich, 03.2025 - 09.2025
Shuyue Wang, Master Thesis, MSc in CS, ETH Zurich, 04.2024 - 03.2025
Chang-Jin Lee, Bachelor Thesis, BSc in CS, ETH Zurich, 04.2024 - 10.2024
Andela Ilic, Master Thesis, MSc in EE, ETH Zurich, 04.2024 - 10.2024, now PhD Student at ETH Zurich
Ying Xue, Master Thesis, Research Intern, MSc in CS, ETH Zurich, 01.2024 - 05.2025, now PhD Student at ETH Zurich
Changlin Qian, Research Intern, MSc in Robotics, ETH Zurich, 09.2023 - 07.2024, now Software Engineer at Meta
Rayan Armani, Research Assistant, MSc in Robotics, ETH Zurich, 2023.09 - 03.2024, now Software Engineer at Apple
Yasaman Haghighi, Research Intern, MSc in EE, EPFL, 2023.07 - 2024.01, now PhD Student at EPFL
Xuejing Luo, Master Thesis, MSc in Robotics, ETH Zurich, 05.2023 - 02.2024, now PhD Student at Aalto University
Xintong Liu, Master Thesis, MSc in Robotics, ETH Zurich, 03.2023 - 03.2024
Filip Stanisic, Semester Thesis, MSc in EE, ETH Zurich, 03.2023 - 07.2023
Huajian Qiu, Master Thesis, MSc in CSE, EPFL, 2021.10-2022.01, now PhD Student at Unviersity of Stuttgart